|
|
| |
ENCODER
Gli encoder sono dispositivi ottico-elettronici utilizzati come trasduttori di posizione angolare e di velocità di rotazione di assi. Trovano applicazione negli azionamenti per macchine utensili, nei posizionamenti, nei motori in generale. Essenzialmente sono costituiti da un disco, solidale a un asse di rotazione, sulla periferia del quale sono ricavati per fotoincisione dei segmenti radiali, alternativamente trasparenti e opachi. A un lato del disco è collocato un fotodiodo che emette un pennello sottile di luce in direzione del fototransistore posizionato sul lato opposto del disco; la luce emessa dal fotodiodo raggiunge il fototransistore solamente quando un segmento trasparente vi si trova interposto. La rotazione del disco viene quindi tradotta in un treno di impulsi di conduzione trasmessi al fototransistore.
Esistono fondamentalmente tre tipi di trasduttori digitali di spostamento rotazio 353i82d nale (ma anche traslazionale): tachimetrico, incrementale, assoluto. Essi si differenziano principalmente per il segnale che forniscono in uscita.
L'encoder tachimetrico è costituito essenzialmente da un disco forato che ruota con il corpo di cui si vuole controllare la velocità, e da un generatore di segnale formato da un LED e un fotosensore allineati. La rotazione del disco del disco fa si che la luce emessa dal LED raggiunga il fotosensore quando uno dei fori si posiziona tra il LED e il fotosensore stessi. Il segnale d'uscita generato dal fotosensore sarà pertanto un treno d'impulsi, di frequenza proporzionale alla velocità di rotazione. Se il movimento avviene sempre nello stesso verso, un contatore digitale che conti gli impulsi è in grado di fornire l'entita dello spostamento rispetto ad una posizione di riferimento. Naturalmente una rotazione in verso opposto, producendo impulsi uguali ai precedenti, causerebbe una lettura di posizione del tutto errata; per questo motivo il tachimetro digitale può essere usato solo per misure di velocità oppure per misure di spostamento angolare in situazioni in cui il movimento non s'inverte.
L'encoder incrementale, illustrato schematicamente in figura, elimina l'inconveniente sopra citato.
Esso comprende, infatti, almeno due generatori di segnali (sensori A e B), disposti in modo che i due segnali prodotti risultino sfasati di circa ¼ di periodo; si desume il verso di rotazione osservando quale dei due segnali è in anticipo. Il conteggio degli impulsi può essere effettuato ad esempio mediante il circuito di figura. Il contatore riceve in ingresso il segnale Va ed esegue il conteggio avanti o indietro secondo lo stato di uscita, rispettivamente 1 o 0 del flip flop FF. quest'ultimo commuta sul fronte di salita del clock costituito dal segnale Vb; la sua uscita commuterà (o rimarrà) ad 1 se, in corrispondenza di ciascun fronte di salita di Vb, Va è alto; questa situazione corrisponde evidentemente al verso di rotazione orario. Viceversa in corrispondenza del fronte attivo di Vb il segnale Va è basso, il flip flop si porterà a 0, segnalando il verso di rotazione antiorario.
Un inconveniente intrinseco all'uso di tutti questi encoder è rappresentato dal fatto che la logica di conteggio è talvolta sensibile ai disturbi, che possono causare errori irrimediabili. Inoltre la caduta dell'alimentazione, anche solo momentanea, fa perdere ogni informazione sulla posizione raggiunta.
Fig.1
encoder incrementale
Fig. 2
circuito di conteggio di un encoder incrementale

Fig. 3
forme d'onda di uscita di un contatore
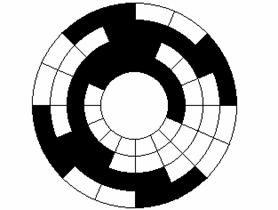
Gli encoder assoluti invece presentano più tracce opache, più elementi generatori di segnale e più uscite; queste sono lette in parallelo e forniscono un numero binario che fornisce direttamente la posizione dell'oggetto rotante.
Spesso il codice binario degli encoder assoluti è sostituito con il codice Grey per evitare errori dovuti a leggere imperfezioni costruttive.
Alcuni degli errori costruttivi che si possono incontrare in un encoder sono ad esempio:
I sensori (TIL 81, TIL 31) non sono perfettamente allineati
Dimensioni sproporzionate del sensore rispetto al settore (ciò è più significativo nelle zone vicine al centro del disco)
Asse leggermente inclinato (quando il disco si sposta il sensore va ad interporsi tra 2 settori)
Sostanzialmente il codice Gray viene sostituito al codice binario in quanto anche se si presenta uno dei tre errori suddetti, e quindi c'è una variazione della lettura da parte dei sensori, l'errore stesso non comprometterebbe in modo molto rilevante la misurazione dello spostamento. Infatti caratteristica di questo codice è che tra un valore e il suo successivo (o precedente) c'è una variazione di un solo stato logico
![]()
|
|
A |
B |
C |
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fig. 4
disco di un encoder assoluto e dati di uscita in codice gray
|
Privacy |
Articolo informazione
Commentare questo articolo:Non sei registratoDevi essere registrato per commentare ISCRIVITI |
Copiare il codice nella pagina web del tuo sito. |
Copyright InfTub.com 2026