|
|
| |
Altri strumenti dipendono invece dalla teoria e non potrebbero sussistere (o essere progettati) senza di essa. Accomuna invece tutti questi meccanismi la possibilità (ad essi intrinseca) di essere usati come "organi" in macchine più complesse. Molti di questi strumenti possono essere catalogati come sistemi articolati oppure come biellismi, ossia come meccanismi costituiti da elementi rigidi (aste) uniti tra loro in punti di collegamento (accoppiamenti); l'invenzione di questi tipi di strumenti si può affermare che sia stata quasi intrinseca nell'uomo, in quanto lo stesso corpo umano, formato da aste (le ossa) "incernierate" tra loro, offre un più che valido modello.
La differenza tra un sistema articolato ed un biellismo è che il primo è costituito da aste che, analizzate in coppia, possono solo ruotare una rispetto all'altra (coppie rotoidali); mentre il biellismo è costituito da aste di cui alcuni punti sono costretti a scorrere in determinate scanalature.
(asse fisso)
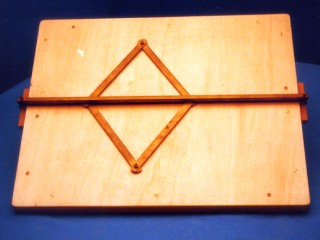
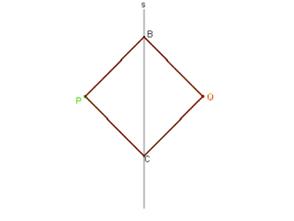
Il biellismo per realizzare le simmetrie assiali ortogonali è costituito da quattro aste rigide e congruenti unite tra loro a formare un rombo articolato; due vertici opposti del rombo, B e C, sono vincolati a scorrere in una scanalatura s che costituisce anche l'asse della simmetria ortogonale. I restanti due vertici, P e Q, mantengono in tal modo due gradi di libertà. La macchina realizza una corrispondenza tra le due
regioni del piano opposte all'asse s. A questo punto qualsiasi posizione acquisiscano i punti P e Q, il segmento che li congiunge rimane sempre perpendicolare alla retta passante gli altri due vertici, poiché le diagonali di un rombo sono perpendicolari; inoltre queste godono anche della proprietà di bisecarsi scambievolmente, e quindi la retta s non è nient'altro che l'asse del segmento PQ, perciò i punti P e Q si corrispondono c una simmetria ortogonale rispetto a s.
NOTA: Il rombo articolato è un caso particolare di quadrilatero articolato, il quale si definisce come sistema articolato costituito da quattro membri rigidi collegati tra loro da quattro accoppiamenti in generale rotoidali; uno dei membri del sistema è fisso e prende il nome di telaio o ponte; il membro opposto al ponte è chiamato biella e i membri che collegano il ponte alla biella sono detti manovelle se possono compiere un moto rotatorio completo, bilancieri nel caso contrario. Le posizioni nelle quali il bilanciere inverte il suo moto prendono il nome di punti di regresso.
Il quadrilatero articolato si dice "piano" quando gli assi degli accoppiamenti sono tra loro paralleli, si dice "sferico" quando gli assi degli accoppiamenti convergono tutti in un sol punto.Il quadrilatero articolato è un sistema desmodromico, ossia ha un solo grado di libertà. I limiti di movimento dei membri di un quadrilatero articolato sono fissati dalla seguente regola di Grashof: "un quadrilatero articolato piano può essere a doppia manovella o a manovella e bilanciere, soltanto se la somma del più piccolo e del più grande dei suoi lati è minore della somma degli altri due. In tal caso è a doppia manovella se l'asta fissa è la più corta, è a manovella e bilanciere se l'asta fissa (telaio) è contigua alla più corta. In tutti gli alti casi, il quadrilatero è a doppio bilanciere e quindi nessuna delle due manovelle può ruotare per un giro completo".
Uno dei Quadrilateri articolati di frequente impiego nelle macchine è il tipo a manovella e bilanciere, in quanto consente di trasformare un moto rotatorio continuo in un moto rotatorio alternato o viceversa. Oltre al rombo articolato, utilizzato per disegnare simmetrie assiali ortogonali, un altro quadrilatero articolato molto adoperato nel disegno è il parallelogramma articolato, con lati opposti paralleli, e la cui struttura sta a fondamento del tecnigrafo; inoltre il parallelogramma articolato, per la proprietà della sua biella di costringere le due manovelle a ruotare alla stessa velocità, era anche utilizzato nelle vecchie locomotive a vapore.
Se in un quadrilatero articolato uno degli accoppiamenti rotoidali viene sostituito da un accoppiamento prismatico, si ottiene un manovellismo, che trova largo impiego nelle macchine per la trasformazione di moti rotatori in moti rettilinei alternati o viceversa.
Biellismo per la composizione di due simmetrie assiali (assi paralleli)
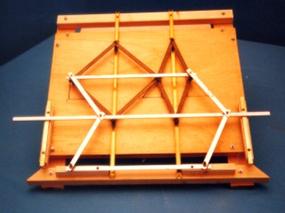
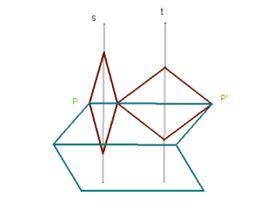
Il biellismo per realizzare la composizione di due simmetrie assiali con assi paralleli illustra il seguente teorema: "Il prodotto di due simmetrie assiali ortogonali con assi di simmetria paralleli è una
traslazione con direzione perpendicolare agli assi di simmetria e modulo uguale al doppio della loro distanza". Questo sistema articolato è costituito da tre macchine: ci sono due rombi articolati (la cui struttura è già stata descritta nel precedente biellismo) per le simmetrie assiali ortogonali, con assi s e t paralleli e distanti d tra loro; i due rombi sono collegati tra loro in modo da realizzare il prodotto delle due simmetrie; vi è poi un traslatore di Kempe fissato al piano in direzione perpendicolare a s e t, e vincolato ai punti P e P' (che si corrispondono nel prodotto delle due simmetrie) in modo che, partendo dal punto P, si ottenga il punto P' con una traslazione do modulo 2d. A questo punto, spostando il punto P e rimanendo fissi i due assi di simmetria s e t, si può notare come tutto il sistema articolato si metta in movimento, verificando per ogni posizione assunta da P il teorema sopra citato.
NOTA: Il traslatore di Kempe è un sistema articolato che mostra come generare una traslazione
ponendo immediatamente in corrispondenza due regioni distinte del piano (senza quindi "uscire" da tale piano). Il traslatore di Kempe è costituito da due parallelogrammi articolati con un lato in comune, e di questi parallelogrammi uno ha il lato parallelo a quello in comune fissato al piano.
A questo punto qualsiasi posizione assumano i due vertici non in comune del parallelogramma non fissato al piano, le loro traiettorie saranno sempre corrispondenti in una traslazione con modulo congruente alla lunghezza del lato fissato al piano.
Biellismo per la composizione di due simmetrie assiali (assi incidenti)
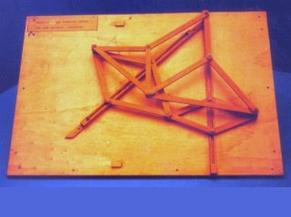
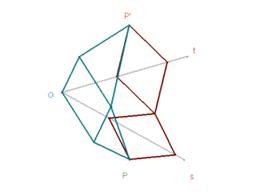
Il biellismo per realizzare la composizione di due simmetrie assiali con assi incidenti illustra il seguente teorema: "Il prodotto di due simmetrie assiali ortogonali con assi di simmetria incidenti in un punto O è una rotazione di centro O e ampiezza uguale al doppio dell'angolo formato dagli assi di simmetria." Questo sistema articolato è costituito da tre macchine: ci sono due rombi articolati (la cui struttura è descritta nel primo biellismo) per le simmetrie assiali ortogonali con assi s e t incidenti nel punto O e formanti l'angolo sOt = ß; i due rombi sono collegati in modo da realizzare il prodotto delle due simmetrie con assi incidenti; vi è poi un pantografo di Sylvester per rotazioni, imperniato in O al piano del modello e vincolato ai punti P e P' (che si corrispondono nel prodotto delle due simmetrie) in modo che, partendo dal punto P, si ottenga il punto P' con una rotazione di centro O e ampiezza 2ß.A questo, spostando il punto P e rimanendo fissi i due assi di simmetria s e t incidenti in O, si può notare come tutto
il sistema articolato si metta in movimento, verificando per ogni posizione assunta da P il teorema sopra citato.
NOTA: Come tutti i tipi di pantografi, anche il meccanismo del pantografo di Sylvester (1875)
per le
rotazioni, è basato sull'impiego di un parallelogramma articolato,
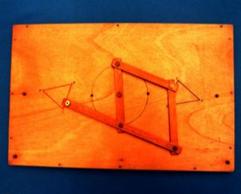
a due lati consecutivi del quale sono
vincolati due triangoli isosceli simili (in modo che uno dei loro lati uguali
coincida con uno dei lati del parallelogramma e le loro basi s'incontrino in un vertice di questo).
Il vertice del parallelogramma opposto
a quello comune ai due triangoli è imperniato in un punto fisso del piano
(centro di rotazione). I punti corrispondenti nella rotazione sono i vertici
dei triangoli che non coincidono con vertici del parallelogramma. L'ampiezza della rotazione è uguale
all'ampiezza dell'angolo al vertice dei triangoli scelti. Se i triangoli
costruiti sui lati del parallelogramma hanno angolo al vertice piatto
(triangoli degeneri) si ha una rotazione d'ampiezza uguale a 180° (cioè una
simmetria centrale).
Il pantografo di Sylvester è anche utilizzato
per le rotoomotetie.
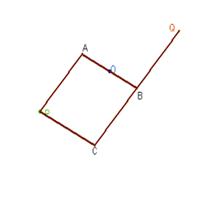
Esistono due differenti versioni del pantografo di Sylvester: quella illustrata nella figura sulla sinistra è quella già descritta sopra, con uno dei vertici del parallelogramma articolato imperniato al piano e due triangoli isosceli simili costruiti sui due lati consecutivi opposti a questo vertice; nella versione illustrata invece nella figura sulla destra il perno del sistema articolato è il punto medio di uno dei lati del parallelogramma (AB), e l'asta del lato CB consecutivo ad AB è prolungata di una lunghezza BQ = CB. Poichè i punti P e Q sono allineati con O e OP = OQ, le loro traiettorie si corrispondono con una simmetria centrale con centro in O (la simmetria centrale può anche essere vista come una rotazione d'ampiezza 180°, quindi questa seconda versione del pantografo di Sylvester non fa nient'altro che realizzare un caso particolare della prima).
|
Privacy |
Articolo informazione
Commentare questo articolo:Non sei registratoDevi essere registrato per commentare ISCRIVITI |
Copiare il codice nella pagina web del tuo sito. |
Copyright InfTub.com 2025