|
|
| |
Relazione:
IL GPS


La struttura del GPS
Il sistema GPS (Global Positioning System) è costituito da una costellazione di satelliti artificiali NAVASAR (NAVigation Satellite with Timing And Ranging), realizzata e destinata dal dipartimento di Difesa degli Stati Uniti d'America per permettere il continuo posizionamento in tempo reale di oggetti sulla superficie terrestre, in mare e in cielo.
La gestione e la proprietà del sistema di posizionamento militare ne testimoniano le origini strettamente militari sono stati impiegati in ambito civile a scopo pacifico.
Anche l'Unione Europea sta realizzando un sistema satellitare analogo denominato GALILEO.
Il sistema NAVASTAR-GPS si basa sull'emissione di onde elettromagnetiche complesse da parte di una rete di satelliti artificiali che vengono ricevute da un'opportuna strumentazione la quale riceve e interpreta questi segnali e quindi diventa possibile determinare, in tempo reale o in tempi successivi, la distanza tra il satellite e il punto in cui è posizionata la strumentazione.
La posizione dei punti avviene rispetto ad un sistema di riferimento spaziale X,Y,Z con origini nel centro della massa terrestre (geocentrico) noto con la sigla WGS84; queste coordinate possono essere trasformate in coordinate geografiche e in coordinate cartesiane riferite ad un sistema di riferimento locale.
Il livello di precisione dipende:
Modalità di misura;
Distanza punto-satellite;
Caratteristiche del ricevitore;
Tecniche di rilievo;
Numero e configurazione dei satelliti impiegati.
Si possono ottenere determinazioni grossolane ma in tempo reale con una precisione di decine di metri fino a raggiungere una precisione millimetrale ma non in tempi reali poiché è necessario un trattamento dei dati.
Attualmente i satelliti vengono impiegati per realizzare le reti d'inquadramento e per il rilievo dei particolari topografici.
 I vantaggi nell'utilizzo del GPS sono:
I vantaggi nell'utilizzo del GPS sono:
Le condizioni atmosferiche non sono un ostacolo per il rilievo;
Non occorre la collimazione(non è necessaria la visibilità tra i due punti);
Semplificazione nell'individuare la rete di inquadramento;
Riduzione di tempo nelle operazioni preliminari del rilievo
Non è necessaria la presenza di personale specializzato;
Omogeneità del sistema di riferimento (WGS84) per tutti i rilievi.
Il sistema GPS ha tre componenti:
sezione spaziale:
 sono i satelliti che inviano alla
terra i segali elettromagnetici;
sono i satelliti che inviano alla
terra i segali elettromagnetici;
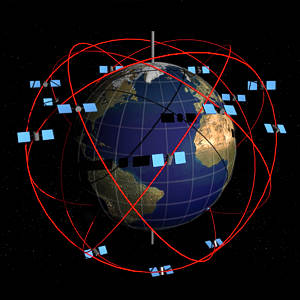
La costellazione attualmente è costituita da 32 satelliti,di cui 28 operanti e 4 di scorta,sono collocati su 6 orbite circolari inclinate di 55°sul piano equatoriale e distanziato di 60°.
Il raggio delle orbite è di circa 26000km.
Ciascun satellite impiega 12h per compiere l'intera rivoluzione.
I satelliti NAVSTAR pesano 850kg e hanno una vita di 7-8 anni;essi a bordo contengono 4 orologi atomici i cui oscillatori servono a generare un segnale elettromagnetico.
Compiti principali:
Trasmettere e ricevere informazioni dalle stazioni di controllo;
Trasmettere informazioni agli utenti tramite le onde;
Misurare il tempo con gli orologi atomici;
Eseguire correzioni orbitali secondo i parametri essegnati dalle stazioni di controllo.
sezione di controllo:
è una struttura a terra che gestisce e controlla l'intera costellazione di satelliti definendone la posizione;
E' un'attività svolta da 5 stazioni a terra distribuite in prossimità dell'equatore e nell'ambito di basi militari.
Il modello matematico delle orbite è molto preciso ma possono avere delle variazioni.
La stazione principale è quella di Colorado Spring, essa raccoglie dati e informazioni delle altre sezioni di controllo e quindi vengono elaborati e valutati.
I satelliti compiendo l'intero giro della terra in 12 ore passano 2 volte sopra i satelliti che a quel punto misurano la loro altezza, la loro velocità, la loro posizione e quindi viene presunta la loro orbita,rilevando le variazioni rispetto al modello matematico;tale variazioni sono indicate come errori delle effemeridi.
Una volta definita la posizione di un satellite il sistema di controllo invia le informazioni al satellite che a sua volta invia le informazioni ai ricevitori degli utenti durante il rilievo.
sezione di utenza:

sono le apparecchiature per la ricezione e l'interpretazione dei segnali emessi dai satelliti per la determinazione della posizione;
E' costituita dagli utilizzatori militari o civili che devono essere provvisti del necessario equipaggiamento.
Questo può essere più o meno sofisticato, ma in ogni caso composto da un'antenna e un ricevitore in grado di captare i segnali dei satelliti,o per ottenere il posizionamento tridimensionale in tempo reale, o in posizione statica per raccogliere dati da usare in una successiva elaborazione che fornisce risultati più precisi e in linea con le esigenze dei rilievi topografici.
Tutti i ricevitori hanno un oscillatore che riproduce un segnale elettromagnetico identico a quello ricevuto dai satelliti anche se con una precisione e una stabilità minore.
Quindi per ogni segnale ricevuto da ciascun satellite viene generata la riproduzione dello stesso segnale detta replica la quale è necessaria per determinare la distanza tra il centro dell'antenna e del satellite.
I principi di funzionamento del sistema GPS
Il compito del sistema è quello di determinare la posizione tridimensionale di un punto.
I principi fondamentali sono molto semplici anche se si tratta di una tecnologia complessa.
Ciascun satellite NAVSTAR emette onde radio che trasportano informazioni di vario tipo;queste emissioni sono governate dai quattro orologi atomici di grandissima precisione e stabilità che sono a bordo del satellite.
Il segnale radio (oltre all'istante preciso dell'emissione)trasporta informazioni connesse all'esatta posizione del satellite nell'orbita.
 Quando il segnale viene captato dal
ricevitore ,viene misurato il tempo che esso impiega per raggiungere
l'antenna(montata su un treppiedi o un'asta metallica);esso permetterà di
determinare la distanza tra satellite e antenna. Misurando simultaneamente le
distanze di tre satelliti è possibile effettuare una trilaterazione da punti
noti per calcolare la posizione del centro dell'antenna. Il punto risulta
l'intersezione di tre sfere i cui centri corrispondono alla posizione dei
satelliti.
Quando il segnale viene captato dal
ricevitore ,viene misurato il tempo che esso impiega per raggiungere
l'antenna(montata su un treppiedi o un'asta metallica);esso permetterà di
determinare la distanza tra satellite e antenna. Misurando simultaneamente le
distanze di tre satelliti è possibile effettuare una trilaterazione da punti
noti per calcolare la posizione del centro dell'antenna. Il punto risulta
l'intersezione di tre sfere i cui centri corrispondono alla posizione dei
satelliti.
La misura dell'intervallo di tempo che impiega il segnale a raggiungere l'antenna del ricevitore deve essere eseguita con estrema precisione.
Le onde hanno la velocità della luce e quindi il loro percosso dura pochi centesimi di secondo.
Per determinare gli istanti di emissione e di ricezione del segnale che viene utilizzato nel calcolo della distanza si considera la codifica del segnale e la perfetta sincronizzazione degli orologi a bordo dei satelliti con quelli installati nei ricevitori.
Satellite e ricevitori devono essere sincronizzati per dare lo stesso codice nello stesso momento.
Il ricevitore valuta il codice ricevuto e stabilisce quanto tempo prima il ricevitore ha emesso la replica del codice.
L'impiego di segnali codificati permette di ripetere la misura in tempo reale per un numero infinito di volte.
La ricezione di questi segnali con ricevitori non abilitati viene recepito come un rumore di fondo.
La precisione e la stabilità dell'orologio installato sui ricevitori è minore degli orologi atomici a bordo dei satelliti quindi è necessaria una sincronizzazione ma non è perfetta quindi esiste uno sfalsamento, tra i due tipi di orologi,cioè l'emissione dal ricevitore al ricevitore di un segnale a solo andata che costituisce un'incognita per il modello matematico.
 Questo fatto esige la disponibilità di
almeno 4satelliti in modo che si possa scrivere un sistema di 4 equazioni in 4
incognite.
Questo fatto esige la disponibilità di
almeno 4satelliti in modo che si possa scrivere un sistema di 4 equazioni in 4
incognite.
La ricezione contemporanea di 4 satelliti consente di impostare un numero sufficiente di equazioni per risolvere il problema.
La come abbiamo detto la distanza antenna-satellite viene misurata sulla base della semplice misura del tempo di percorrenza del segnale ed è affetta da errori sensibili valutabili di decine di metri,per questa ragione essa viene chiamata pseudo-distanza.
La presenza di un quarto satellite in aggiunta ai tre teocraticamente sufficienti consente di superare le incertezze connesse alla mancata sincronizzazione tra gli orologi.
Il segnale proveniente dal satellite viene in parte alterato quando attraversa l'atmosfera anche da altri fattori che sono fonte d'errore e che quindi causano una riduzione di precisione.
La velocità di propagazione di tutti i segnali radio è costante nel vuoto ma viene ritardata quando attraversa uno strato di particelle cariche di elettricità;quindi possiamo chiaramente capire che il segnale emesso dal satellite, il quale percorre una distanza maggiore di 20000km, ne momento che oltrepassa la ionosfera che è costituita da particelle cariche elettricamente le quali rallentano la velocità di propagazione del segnale emesso dal satellite.
Il segnale percorre anche la troposfera e anche in questo
caso subisce una variazione di velocità. 
Il segnale potrebbe poi non giungere direttamente al ricevitore, ma potrebbe essere riflesso e sdoppiato da ostacoli di vario genere e anche questo riduce la precisione.
E' necessario considerare la posizione dei satelliti che risentono delle asimmetrie del campo gravitazionale terrestre quindi non è perfetta.
 La determinazione della posizione di
un punto con un solo ricevitore e l'utilizzo di almeno quattro satelliti,che
prende il nome di GPS assoluto,che viene definita in tempo reale ma con errori
di alcune decine di metri.
La determinazione della posizione di
un punto con un solo ricevitore e l'utilizzo di almeno quattro satelliti,che
prende il nome di GPS assoluto,che viene definita in tempo reale ma con errori
di alcune decine di metri.
Una maggiore precisione si ottiene con la tecnica differenziata (DGPS) con il quale si utilizzano almeno due ricevitori per acquisire da entrambi segnali emessi da almeno 4 satelliti.
Gli errori possono essere eliminati ma la maggior precisione viene pagata con il fatto che la determinazione del punto non viene ottenuta in tempo reale ma con un'elaborazione successiva alla raccolta delle informazioni la cui durata dipende dalla precisione che si desidera ottenere e dalla configurazione dei satelliti utilizzati.
Col GPS differenziale la misura viene effettuata per coppie di punti sui quali si collocano simultaneamente due ricevitori in questo modo si ottiene la posizione relativa di un punto rispetto ad un altro che deve essere noto,attraverso le differenze ∆X, ∆Y, ∆Z delle coordinate dei punti nel sistema WGS84.
Il segmento che unisce ciascuna coppia di punti nel GPS differenziale viene denominato linea di base(baseline).
La precisione ottenibile dipende dalle distanze misurate,dalla qualità e dalle caratteristiche del ricevitore, dalla durata del rilevamento dei dati e dalla configurazione dei satelliti impiegati.
Essa varia da qualche millimetro ad alcuni centimetri.
La tecnica del GPS differenziale è sicuramente l'approccio più conveniente nei rilievi topografici sia per la precisione per le flessibilità che la caratterizza.
Il sistema di riferimento WGS84



E' un sistema di posizionamento globale pertanto è in grado di determinare dei punti in qualsiasi parte della terra e quindi occorre che essi siano riferiti a un sistema di riferimento unico per tutto il pianeta e fisso rispetto il suo movimento.
Il sistema di riferimento cartesiano tridimensionale adottato nell'ambito del GPS viene indicato con la sigla WGS84.
 L'indicazione 84 è dovuta dal fatto
che al sistema di riferimento è stato associato un ellissoide avente la stessa
origine del sistema cartesiano e i cui parametri fondamentali sono stati
determinati fino al 1984.
L'indicazione 84 è dovuta dal fatto
che al sistema di riferimento è stato associato un ellissoide avente la stessa
origine del sistema cartesiano e i cui parametri fondamentali sono stati
determinati fino al 1984.
WGS84 ha le seguanti caratteristiche:
Origine nel baricentro della massa terrestre _ sistema geocentrico;
Asse Z coincide con l'asse polare convenzionale;
Asse X definito dall'intersezione del piano equatoriale (ortogonale all'asse polare convenzionale)con il piano meridiano di riferimento(Greenwich);
Asse Y si trova sul piano equatoriale e ortogonale all'asse X.
Le informazioni ricevute permettono di definire la terna di coordinate cartesiane X, Y, Z rispetto a questo sistema di riferimento che anche essere espresse in coordinate geografiche ellissoidiche.
Si possono trasformare in coordinate cartografiche N, E, Z del sistema Gauss-Boaga oppure in coordinate x, y, z rispetto a qualunque sistema di riferimento locale. Per queste operazioni esistono appositi programmi.
Nel sistema GPS sia le coordinate planimetriche sia la quota adottano la medesima superficie di riferimento:l'ellissoide e quindi sono omogenei.
In campo topografico e geodetico i sistemi a cui sono riferiti i punti sono di tipo ibrido perché le coordinate planimetriche sono riferite all'ellissoide mentre le quote sono riferite al livello medio del mare quindi al geoide e ottenuti con vari tipi di livellazioni.
In poche parole mentre le tre coordinate geocentriche ottenute dalle osservazioni satellitari hanno un riferimento univoco, in topografia i riferimenti sono due e distinti:l'ELLISSOIDE per le componenti planimetriche e il GEOIDE per le altimetriche.
Lo scostamento tra le due superfici(geoide e ellissoide) si chiama ondulazione del geoide e varia da zona a zona.
Per trasformare la quota ellissoidica in quota ortometrica occorrerebbe conoscere gli scostamenti locali N tra geoide ed ellissoide con la stessa precisione .
Purtroppo la conoscenza di N è legata alla conoscenza locale del geoide e quindi è nota solamente con errori.
In Italia tale incertezza nella determinazione di N è compresa tra i 30 e i 50 cm, pertanto non è possibile sostituire le quote GPS alle quote ottenute per livellazione che sono più precise, se non accettandone il degrado di precisione altimetrica descritta.
Se il rilievo non è di grande estensione conviene stazionare con il GPS in alcuni punti adeguatamente distribuiti e di quota ortometrica nota in modo che può essere calcolata l'ondulazione del geoide N su questi punti , per differenza tra la quota GPS e quella ortometrica nota e interpolare poi tali valori per l'intera zona.
Il segnale dei satelliti nel GPS
In ciascun satellite NAVSTAR sono presenti 4 oscillatori di grande precisione e stabilità che forniscono un segnale elettromagnetico con frequenza di base di 10,23 MHz, dal quale si ottengono 2 onde portanti denominate L1 ed L2 che compongono il segnale radio inviato dal satellite,.
Le caratteristiche delle 2 onde portanti sono:
L1: frequenza f1= 1575.42MHz lunghezza d'onda λ1 = 19cm
L2: frequenza f2= 1227.60 MHz lunghezza d'onda λ2 = 24 cm
La presenza delle due onde portanti di diversa frequenza è necessaria per correggere il ritardo che il segnale subisce nell'attraversamento della ionosfera, infatti valutando il tempo d'arrivo delle due differenti parti del segnale si può dedurre l'entità del ritardo.
I segnali L1 ed L2 sono poi modulati secondo due speciali codici binari che si ripetono nel tempo e che sono detti pseudo causali.
Il principio di questi codici è A/C (acquisizione grossolana).
Esse si ripetono ogni millisecondo ed è diverso in ciascun satellite per permettere l'identificazione.
 Il secondo codice detto codice P
consiste in un'altra sequenza pseudo causale di +1 e -1 che si ripetono ogni
267 giorni che permette una maggiore precisione nel posizionamento del punto.L1
viene modulata secondo entrambi i codici per L2 si utilizza solo il codice P.
Il secondo codice detto codice P
consiste in un'altra sequenza pseudo causale di +1 e -1 che si ripetono ogni
267 giorni che permette una maggiore precisione nel posizionamento del punto.L1
viene modulata secondo entrambi i codici per L2 si utilizza solo il codice P.
Esiste anche un terzo codice detto D(data) anch'esso di tipo binario ma strutturato in modo da trasmettere un messaggio di navigazione contenente informazioni sulla posizione e lo stato di salute del satellite.
La portante viene modulata moltiplicandola per lo stesso codice.
A ogni passaggio da -1 a +1 viene provocato uno sfalsamento dalla portante di 200gon.
Se non si ha una variazione nello stato del codice allora non si ha alcun sfasamento della portante.
Gli utenti devono essere provvisti di apparecchiature in grado di ricevere, interpretare, memorizzare ed elaborare i segnali provenienti dai satelliti.
Queste apparecchiature di fatto sono dei ricevitori composti da un'antenna che capta il segnale e da un certo numero di componenti elettronici.
Ci sono ricevitori in grado di ricevere sono il segnale L1 e sono definiti a singola frequenza poi ci sono ricevitori in grado di ricevere entrambi i segnali e sono definiti a doppia frequenza, quest'ultimi sono più costosi ma più precisi in quanto con i segnali a differente frequenza si può valutare e compensare il ritardo ionosferico.
Poiché occorre registrare contemporaneamente più segnali inviati dai satelliti il ricevitore è provvisto di dispositivi chiamati canali.
Il canale è come un circuito elettronico cioè un percorso che il segnale di un singolo satellite segue nel ricevitore.
I ricevitori meno costosi sono quelli con un solo canale dedicato sequenzialmente alla ricezione del segnale dei vari satelliti agganciati.
I ricevitori più recenti per impieghi topografici sono forniti di più canali e ciascuno di essi registra in continuazione il segnale di un solo satellite.
Attualmente i ricevitori possono avere tra i 4 e i 12 canali.
Misure effettuate dal GPS
Il segnale emesso dai satelliti del sistema GPS viene registrato dai ricevitori.
Essendo noti i codici con cui sono modulate le onde portanti e utilizzando l'oscillatore al quarzo di cui sono dotati i ricevitori, al loro interno viene eseguita una replica del segnale satellitare, durante i primi minuti dopo l'accensione.
Questa riproduzione crea un segnale simile a quello registrato da ogni satellite agganciato, ma si differenzia da questi per uno sfasamento di tempo chiamato ritardo di tempo.
Con il GPS viene misurata la distanza satellite-antenna del ricevitore usando 2 tipi di elaborazioni del segnale satellitare:
Distanze pseudo-range(effettuate sulle portanti modulate dai codici C/A e P);
Distanze con misura delle fasi(ottenute dopo la demodulazione delle portanti).
La misura pseudo-range consente un posizionamento rapido in tempo reale e con un solo ricevitore me in preciso ed è quindi inadeguato nel contesto topografico se non per un posizionamento grossolano.
Invece la misura della distanza satellite-ricevitore con la misura delle fasi non consente la misura in tempo reale ma solo dopo un certo tempo di elaborazione.
Tali misure richiedono almeno due ricevitori (GPSdifferenziale)ma hanno la precisione necessaria nel campo topografico.
Misura pseudo-range
Misurare il tempo necessario al segnale emesso dal satellite per raggiungere l'antenna del ricevitore.
Conoscendo la velocità c di propagazione nel vuoto e il tempo ∆T intercorso dall'invio alla registrazione di un segnale modulato sulla portante si può in linea teorica calcolare la distanza d:
d= c ∆T
La misura ∆T viene eseguita confrontando il segnale registrato con quello prodotto come replica, valutando di quanto questo deve essere traslato nel tempo per ottenere l'allineamento con il codice ricevuto dal satellite.
Dunque ∆T viene determinato dal tempo che permette di allineare i due segnali modulati dai codici C/A e P.
Conoscendo l'istante Toi in cui il segnale è partito dal satellite i e l'istante Tr nel quale esso è stato registrato dal ricevitore, tenendo conto che la sincronizzazione degli orologi dei satelliti è costantemente controllata e corretta possiamo ritenerla uguale per tutti i satelliti quindi indicando con ∆t la differenza tra gli errori di sincronizzazione satellite-ricevitore si può ottenere l'equazione che fornisce la distanza di tra antenna del ricevitore e il satellite i:
di=c (Tr - Toi) + c ∆t
E' possibile scrivere un'equazione simile a questa per ogni satellite registrato.
La misura fornita è approssimata in quanto condizionata da cause d'errore:
Nella determinazione del tempo d'emissione del segnale;
Nella determinazione del tempo di registrazione del segnale;
Di ritardo ionosferico;
Di ritardo troposferico;
Di posizionamento dell'antenna;
Delle effemeridi del satellite.
Se consideriamo che la distanza tra satellite e antenna può essere espressa in funzione delle tre coordinate note del satellite(Xi, Yi, Zi) e delle tre coordinate incognite del punto(X, Y, Z) e considerando l'errore di sincronizzazione incognito, il problema presenta 4 incognite risolvibili con 4 equazioni fornite dai segnali provenienti dai 4 satelliti; possiamo scrivere:
![]()
![]()
![]()
![]()
La precisione con la quale vieni ottenuta la posizione del punto dopo la risoluzione delle equazioni dipende anche dal codice utilizzato nella misura:
Usando il codice C/A: errore di 30-40 cm;
Usando il codice P: errore di 4-6 cm.
Misura delle fasi (true-range)
Come abbiamo visto la determinazione della distanza ricevitore-satellite basata sulla valutazione del tempo è troppo approssimata per il campo topografico;essendo richieste precisazioni maggiori, è quindi necessario misurare questa distanza con la tecnica detta true-range.
La distanza true-range si ottiene valutando le fasi delle onde portanti dopo averle demodulate dai codici.
La misura è costituita dalla differenza ∆φ tra la fase dell'onda portante registrata dal satellite e quella di una replica riprodotta nel ricevitore nel momento della registrazione.
La misura della distanza in funzione della misura di fase è fornita da un'espressione:
![]()
=lunghezza d'onda del segnale considerato;
N=numero intero dei cicli sul percorso del segnale;
![]() =parte
frazionaria del giro.
=parte
frazionaria del giro.
La distanza ottenuta in questo modo ha una precisione pari al 1% della lunghezza d'onda del segnale pertanto gli errori nella misura della distanza risultano circoscritti teoricamente a qualche millimetro.
Tuttavia demodulando l'onda portante si vengono a perdere tutte le informazioni trasportate dai codici e in particolare l'istante di partenza del segnale.
Senza questo non è possibile determinare il numero dei cicli interi ma è possibile ottenerne la parte frazionaria.
In sostanza la misura di fase realizza l'allineamento del segnale demodulato arrivato dal satellite con quello riprodotto nel ricevitore senza però conoscere quale dei cicli realizzi il reale sincronismo.
Il valore N costituisce un'ulteriore incognita che viene indicata come ambiguità intera di fase.
Si può verificare un'interruzione nella ricezione del segnale che quindi crea un'ulteriore ambiguità Ni incognita.
Queste interruzioni chiamate cycle-slip provocano la comparsa nel modello matematico di numerose incognite aggiuntive.
Riassumendo le incognite nella misura delle fasi,sono:
X, Y, z del punto di stazione del ricevitore;
∆t errore di sincronizzazione degli orologio satellite/ricevitore;
N numero intero di lunghezza d'onda all'istante iniziale;
Ni numero intero di lunghezza d'onda dovute ai cycle slip.
Attraverso le osservazioni eseguiti secondo determinate procedure operative con l'impiego di almeno 2 ricevitori, è possibile eseguire compensazioni in tempi successivi e quindi eliminare gli errori di sincronizzazione dei satelliti, del ricevitore, e le ambiguità N.
Le procedure sono tre:
Le differenze semplici: da 2 ricevitori si registra lo stesso satellite; è possibile eliminare l'errore di sincronizzazione dell'orologio satellitare;
Le differenze doppie:da 2 ricevitori si misurano contemporaneamente le fasi delle onde portanti emesse 2 satelliti;si elimina l'errore di sincronizzazione degli orologi e dei ricevitori
Le differenze triple:viene utilizzato lo stesso metodo delle differenze doppie ma si riesce ad eliminare anche le ambiguità N e Ni.
Valutazione del posizionamento GPS
La posizione e il numero di satelliti variano continuamente per le traiettorie orbitali tracciate, dando luogo via via a diverse configurazioni più o meno favorevoli.
Per misurare la qualità della configurazione geometrica dei satelliti vengono definiti dei parametri DOP che costituiscono un indice di decremento della precisione(più piccoli meglio è).
Essi sono importanti per la programmazione della sessione di rilevazione.
Il valore DOP è inversamente proporzionale al volume della figura che si crea congiungendo il centro dell'antenna ai satelliti in via di registrazione.
Quando i satelliti sono 4 la figura risulta come una piramide rovesciata (più i satelliti sono distanti più sarà grande il volume della figura e più basso sarà il valore DOP).
Vi sono diversi DOP in relazione al tipo di coordinate:
PDOP: Indice di decremento di precisione nella determinazione tridimensionale del punto(X;Y;Z);
HDOP:indice di decremento di precisione nella determinazione planimetrica del punto(X,Y);
VDOP:indice di decremento di precisione nella determinazione altimetrica del punto(Z);
TDOP:indice di decremento di precisione nella determinazione del tempo.
La combinazione del valore PDOP e TDOP
viene detto GDOP:![]()
La precisione con la quale vengono definiti i punti con il sistema GPS dipende da:
Configurazione geometrica e numero dei satelliti;
Precisione con la quale si è misurata la distanza ricevitore-satellite.
Tecniche di rilevamento GPS
Con la tecnica GPS differenziale, si sistemano 2 ricevitori agli estremi del segmento da misurare e registrando almeno 4 satelliti simultaneamente dai 2 ricevitori si può ottenere una grande precisione nella distanza e nell'orientamento del segmento a prescindere dalla morfologia del terreno.
Il sistema GPS non si limita a fornire un mezzo per misurare le distanze ma mette a disposizione una metodologia di rilievo utilizzabile in operazioni di inquadramento e nei rilievi di precisione, in relazione al numero e alla qualità della strumentazione disponibile per il rilievo.
Si usa dividere questi metodi in due diverse tipologie:
Statiche _ in genere usate nel realizzare reti d'inquadramento;
Dinamiche _ in genere usate nel rilievo dei particolari topografici.
Procedure statiche:
Consente di raggiungere la maggior precisione e affidabilità e quindi è utilizzato per creare reti d'inquadramento o per affittire reti già esistenti.
Questa procedura richiede la registrazione di almeno 4 satelliti contemporaneamente da due punti sui quali si collocano i ricevitori che rimarranno fermi per l'intera durata della sessione di misura.
Per sessione di misura si intende il periodo di tempo necessario per registrare i satelliti al fine di determinare la posizione relativa dei due punti.
Il rilievo nella sua complessità sarà costituito da un certo numero di sessioni di misura.
Nel rilievo statico la grande precisione viene pagata con tempi di sessione di 30-60 min.
Le due stazioni costituiscono gli estremi della baseline determinata a seguito di osservazioni.
La tecnica consiste nel posizionare un ricevitore su un punto di coordinate note e l'altro ricevitore via via sui punti incogniti da determinare.
Dopo che il punto è stato determinato in una sessione di misura esso diviene un punto noto per la successiva sessione di misura e così via fintantoché tutti i punti da rilevare saranno stati occupati.
In un rilievo si hanno un certo numero di baseline che sono collegate tra loro in modo da formare una poligonale o una rete più o meno rigida in relazione al numero di baseline determinate.
Successivamente,utilizzando appropriati calcoli, si potrà intervenire per compensare l'intera rete.
In base al numero dei punti da rilevare, alla loro distanza e al numero di ricevitori a disposizione viene programmato quello dei ricevitori, tra una sessione di misura e l'altra, sarà più conveniente tenere fremo e quale traslocarlo ricordando di spegnerlo e di riaccenderlo solo quando è collocato sul punto da determinare.
Uno dei due estremi della baseline deve essere già stato determinato in precedenza.
Utilizzando 3 ricevitori si misurano 4 baseline in più(9 al posto di 5), con una sessione di misura in meno.
Naturalmente il terzo ricevitore ha un costo che va valutato in relazione ai vantaggi in termini di speditezza e razionalità del rilievo.
Se sono presenti due punti di coordinate note rispetto al sistema di riferimento locale è possibile trasformare le coordinate geocentriche dei punti determinati nel sistema WGS84, fornite dal GPS, nelle corrispondenti del sistema locale a seguito di una rototraslazione(procedura di calcolo che richiede la conoscenza di almeno due punti in entrambi i sistemi di riferimento.
Se i punti da determinare in GPS sono distribuiti lungo una linea spezzata si viene a formare lo schema di una poligonale anziché una rete.
La poligonale presenta le stesse problematiche di propagazione degli errori che si trasmettono da punto a punto già esistenti nei rilievi tradizionali.
Rilievo statico veloce
E' del tutto analogo al rilievo statico ma con una durata di sessione di misura che vari tra i 10 e i 20 minuti.
Il rilievo statico veloce richiede l'impiego di ricevitori idonei a fornire in tempi contenuti, le precisioni che sono leggermente inferiori al rilievo statico.
Questi ricevitori devono essere a doppia frequenza, in quanto la correzione dei ritardi ionosferici devono avvenire in tempi molto rapidi.
A volte questo tipo di rilievo può essere usato in combinazione con le procedure dinamiche allo scopo di permettere rapidamente la determinazione di una baseline, che costituirà la fase di inizializzazione di questi metodi.
Rilievo pseudo-statico (o della rioccupazione)
Si tratta di un metodo che si pone tra i metodi statici e quelli dinamici.
Il rilievo pseudo-statico prevede dei tempi di occupazione delle stazioni ridotti a pochi minuti, però occorre tornare almeno una seconda volta a registrare i dati sulle stesse stazioni dopo che è trascorso un lasso di tempo di almeno un'ora, ma non superiore a tre.
Un'ora è ritenuta sufficiente poiché almeno un satellite sia cambiato nella relativa configurazione geometrica.
Il rilievo pseudo-statico permette una maggiore velocità di esecuzione e una maggiore flessibilità nella scelta della configurazione dei satelliti ma non consente alte precisioni.
Procedure dinamiche:
Le procedure operative di tipo dinamico prevedono il movimento del ricevitore durante la sessione di misura per registrare continuamente dati relativi a più punti.
I metodi dinamici si caratterizzano per un più o meno rapido movimento da un punto all'altro.
Le procedure dinamiche sono usate per i rilievi di dettaglio dei particolari dei terreni.
Rilievi di navigazione
Ha una precisione che varia nell'ordine di una decina di metri e per questo non viene usato nelle operazioni topografiche se non per operazioni grossolane e speditive.
Viene utilizzato per il posizionamento di mezzi mobili(navi,veicoli).
Il metodo si basa sulla registrazione continua e costante da parte del ricevitore in movimento dei dati provenienti da 4 satelliti e fornisce continuamente la posizione dei punti.
Rilievo cinematico continuo
Si effettua la continua registrazione dei 4 satelliti e la continua presentazione dei risultati.
Il rilievo cinematico viene eseguito con 2 ricevitori per aumentare la precisione.
Questa tecnica richiede l'impiego continuo di un ricevitore posizionato su un punto di riferimento in registrazione continua e di un secondo ricevitore itinente, anch'esso in registrazione continua.
Durante il movimento del secondo ricevitore il sistema fornisce in modo continuo le varie posizioni che assume l'antenna.
Occorre determinare in via preliminare una baseline di partenza in modo da risolvere su di essa le ambiguità nel software di post-elaborazione.
Tale fase prende il nome di inizializzazione statica.
La parte di inizializzazione con parte mobile del rilievo costituiscono la catena cinematica.
L'antenna del ricevitore itinerante solitamente viene montata su un'asta telescopica, mentre il ricevitore, quando è separato dall'antenna, per comodità viene trasportato in uno zainetto.
Il ricevitore con l'antenna in alcuni casi possono essere montati su veicoli o motocicli.
Per utilizzare questo metodo è necessaria la registrazione di 4 satelliti ed è necessario non perdere il contatto, durante i movimenti del ricevitore itinente, con essi.
Se ci fosse un'interruzione della catena cinematica occorrerebbe ritornare su un punto noto definito in precedenza.
Questa metodologia di rilievo è impiegata nella realizzazione di picchettamenti di varia natura(strade, cave.)
Rilievo stop-and-go
E' largamente impiegato nel campo topografico.
Anche in questo caso viene impiegato un ricevitore che rimane fermo su un punto di riferimento in fase di registrazione continua e un secondo ricevitore, anch'esso in registrazione continua, che si sposta via via sui punti da rilevare facendo stazione pochi secondi.
Durante questa breve sosta il canneggiatore può inserire le informazioni del punto per poi passare al punto successivo.
Anche qui occorre partire con la fase di inizializzazione nella quale si determina la baseline.
La parte mobile del rilievo viene definita catena stop-and.go.
La differenza tra rilievo stop-and-go e cinematico continuo è che per ilprimo si tratta di determinare punti reali mentre per il secondo si tratta della determinazione di istanti temporali.
La programmazione del rilievo con un numero di satelliti superiore a i 4 strettamente necessari ci mette a riparo da molte cause d'interruzione della catena cinematica.
Il rilievo stop-and-go viene utilizzato per i rilievi di dettaglio.
Programmazione della campagna di misura
Anche per i rilievi con GPS l'accurata programmazione preliminare delle sessioni di misura è di fondamentale importanza per ottenere la massima precisione produttività.
Rispetto ai metodi tradizionali di rilievo, le operazioni di individuazione dei punti da rilevare risultano semplificate poiché in ambito topografico non è richiesta la reciproca visibilità tra di essi e le condizioni atmosferiche non sono influenti.
Però bisognerà valutare e programmare con attenzione alcune condizioni che invece non troviamo nei rilievi tradizionali.
Tra queste:
La configurazione geometrica dei satelliti;
Gli ostacoli che possono oscurare il segnale satellitare.
La dotazione dei ricevitori GPS comprende anche alcuni programmi di calcolo la cui funzione è quella di permetter una semplice e rapida programmazione dei tempi di esecuzione delle sessioni di misura.
La configurazione geometrica dei satelliti
Il livello di precisione che si può raggiungere nel posizionamento dei punti è legato al numero dei satelliti che partecipano alla sessione di misura e alla loro dislocazione in cielo.
Come già detto quanto è più piccolo il valore dell'indice PDOP tanto più accurate saranno le osservazioni;in ogni caso non deve superare il valore di 7.
I programmi di calcolo dati con il ricevitore, permettono di definire in un certo momento e per una certa località, il numero di satelliti registrabili e il corrispondente valore del PDOP.
Questi programmi forniscono alcuni diagrammi intuitivi ma fondamentali per programmare le sessioni di misura(quali giorni e quali ore sono idonei per il rilievo GPS).
E' molto importante anche considerare i valori degli indici DOP.
Gli ostacoli che possono oscurare il segnale satellitare
E' molto importante l'elevazione del satellite sull'orizzonte.
Naturalmente l'elevazione di un satellite è legata alla sua traiettoria e perciò varia istante per istante da valori iniziali piccoli per poi aumentare fino a raggiungere un valore massimo, comunque minore di 90°, e quindi diminuire tornando a valori piccoli.
 Quando i satelliti sono bassi
sull'orizzonte la loro posizione diventa precaria, perché il loro segnale è
facilmente oscurabile da ostacoli presenti vicino al ricevitore.
Quando i satelliti sono bassi
sull'orizzonte la loro posizione diventa precaria, perché il loro segnale è
facilmente oscurabile da ostacoli presenti vicino al ricevitore.
Per questo motivo si evita di usare satelliti la cui elevazione è inferiore a 15°.
Per ostacoli s'intendono in genere alberi ed edifici.
A volte per esigenze del rilievo non è possibile posizionare i ricevitori a debita distanza dagli ostacoli;In questo caso è necessario programmare la sessione di misura in tempi nei quali i satelliti non sono ostruiti dall'ostacolo.
I limiti del sistema GPS
Anche il GPS ha dei limiti che talvolta rendono anche impossibile il suo l'impiego.
Infatti se ci troviamo di fronte ad una serie di ostacoli come una vegetazione fittizia o una zona altamente urbanizzata diventa impossibile utilizzare il GPS.
Vi è anche un problema di riflessione del segnale satellitare questo fenomeno è conosciuto con il nome di multiplath.
Il fenomeno multipath è come una serie di rimbalzi che il segnale proveniente dal satellite esegue su diverse superfici prima di raggiungere l'antenna del ricevitore.
Questo fenomeno diminuisce la precisione del rilievo.
Bisogna stare attenti anche alle interferenze sul segnale satellitare di emittenti televisive o ponti radio.
I ricevitori GPS
Abbiamo detto che esistono ricevitori a singola e a doppia frequenza.
A singola frequenza sono più semplici e meno costosi ma hanno un limitato raggio d'azione.
 Inoltre sono inaffidabili nella
determinazione delle quote dei punti poiché non avviene la correzione sul
ritardo ionosferico.
Inoltre sono inaffidabili nella
determinazione delle quote dei punti poiché non avviene la correzione sul
ritardo ionosferico.
A doppia frequenza sono in grado di registrare entrambe le portanti (L1 & L2) e quindi sono più costose ma anche più affidabili dei primi.
Il loro raggio d'azione è illimitato e il loro impiego è necessario nelle operazioni topografiche che necessitano di elevata precisione costante nel tempo.
Un altro parametro importante è il numero di canali.
I ricevitori per la navigazione hanno un solo canale di tipo frequenziale(cioè registra un segnale alla volta).
I ricevitori per l'ambito topografico sono dotati di almeno 4 canali che consentono un funzionamento continuo.
Maggiore è il numero dei canali del ricevitore maggiore sarà il numero di satelliti che si possono registrare in modo continuo e conseguentemente saranno più bassi gli indici DOP.
Alcuni ricevitori hanno un'antenna integrata mentre in altri è separata ed è posizionabile su treppiedi topografici(per rilievi in modalità statica) o su aste telescopiche (per i rilievi cinematici).
I dati acquisiti durante la sessione di misura vengono memorizzati su memorie interne del registratore o su memory card dopo di che in entrambi i casi i dati vengono scaricati sul computer, per essere elaborati.
|
Privacy |
Articolo informazione
Commentare questo articolo:Non sei registratoDevi essere registrato per commentare ISCRIVITI |
Copiare il codice nella pagina web del tuo sito. |
Copyright InfTub.com 2026