|
|
| |
RELAZIONE SECONDO PROGETTO
RICEVITORE AD INFRAROSSI P.P.M.
ANALISI GENERICHE
DESCRIZIONE DEL PROGETTO
La consegna del progetto, prevede la realizzazione di una coppia funzionale di trasmettitore-ricevitore ad infrarossi in modulazione di posizione degli impulsi detta anche PPM (Pulse Position Modulation). In questo tipo di trasmissione di dati, come suggerisce il nome, varia la posizione degli impulsi (ovvero l'intervallo tra uno e l'altro) e non 353j95d larghezza e ampiezza degli impulsi che invece resta costante.
Agendo su quattro dip-switch nel trasmettitore, si seleziona la combinazione di dati da trasmettere (ad esempio 1101 o 0100 ecc.). Tenendo premuto il tasto che attiva il circuito, i dati sono selezionati da un multiplexer con gli ingressi di selezione comandati da un contatore binario. I dati sono successivamente trasmessi da una coppia di diodi emettitori che quando vengono attraversati da corrente, emettono una luce di una lunghezza d'onda invisibile all'occhio umano: l'infrarosso. I diodi emettitori sono detti IRED (Infra-red Emitting Diode) e sono dei trasduttori che trasformano energia elettrica in energia luminosa.
Un foto-diodo presente nel circuito di ricezione, al contrario, quando viene investito da luce infrarossa, va in conduzione e trasforma l'energia luminosa emessa dal diodo emettitore in energia elettrica. Gli impulsi passano in un primo momento in un sofisticato amplificatore, che ha la sola funzione di amplificare il debole segnale composto di impulsi di corrente. Successivamente dopo altri processi di trasformazione degli impulsi, 4 diodi led fungono da visualizzatore del dato trasmesso.
Ogni singola parte del progetto deve essere dimensionata e montata su una basetta fotosensibile doppia faccia di dimensioni massime 10x8cm. Entrambi i progetti devono essere costruiti con integrati appartenenti alla famiglia dei CMOS.
LA TRASMISSIONE IN MODALITÀ PPM
Come già detto, questo tipo di modulazione, in funzione dell'informazione, varia la posizione degli impulsi, rispetto alla posizione in assenza di modulazione; larghezza e ampiezza degli impulsi rimangono inalterate.
Generalmente, e come nel nostro progetto, si trasmette un impulso di riferimento rispetto a cui valutare la posizione dell'impulso modulato, in modo da sincronizzare il ricevitore con il trasmettitore.
Nel progetto in questione, si sono decisi i seguenti tempi:
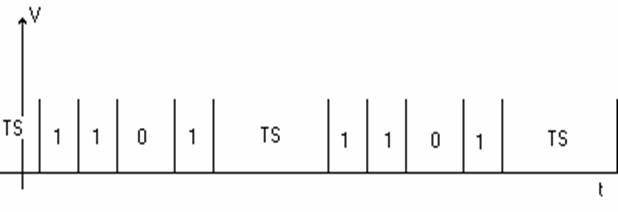
L'intervallo di tempo perché avvenga la trasmissione della cifra
1 è di 10ms;
0 è di 15ms;
E per la trasmissione del tempo di sincronismo l'intervallo tra i due impulsi deve essere di 30ms.
LE FAMIGLIE UNIPOLARI
LE FAMIGLIE LOGICHE
I componenti elettronici base costituenti i vari circuiti integrati digitali sono i transistori bipolari (o BJT dall'inglese Bipolar Junction Transistor) e i transistori unipolari chiamati MOSFET (Metal-Oxide-Semiconductor Field-Effect Transistor), o più comunemente MOS. Un tempo, la maggiore densità di integrazione dei MOS, dovuta alle dimensioni più ridotte, si contrapponeva alla velocità di funzionamento notevolmente maggiore dei BJT.
Le nuove tecnologie hanno portato la velocità di funzionamento dei MOS a competere con quella dei BJT, le cui dimensioni vanno riducendosi sempre più.
In questo quadro di evoluzione si può comunque affermare che la tecnologia MOS è tuttora predominante nell'alta e altissima scala di integrazione (LSI e VLSI) mentre nella piccola e media scala di integrazione (SSI e MSI), le due tecnologie sono in piena competizione.
Le famiglie logiche sono costituite da un insieme di circuiti integrati, normalmente di tipo SSI e MSI. Gli integrati di una stessa famiglia, sono contraddistinti da una stessa sigla iniziale e poi identificati con un numero progressivo diverso per ognuno.
Per quanto riguarda la struttura bipolare, la famiglia TTL o T2L (Transistor-Transistor Logic) è tuttora la fondamentale che a sua volta ha sviluppato delle sottofamiglie caratterizzate da una diversa strutturazione degli integrati. Ad esempio la serie TTL-S impiega il più veloce BJT Schottky, che è caratterizzato da un'altissima velocità di propagazione e la serie TTL-L (Low-power) ha come caratteristica un consumo particolarmente ridotto. Dall'insieme delle due è nata la diffusissima serie TTL-LS (Low-power Schottky) che unisce le due tecnologie.
Per la tecnologia unipolare invece, si può dire che, anche se commercializzata dopo quella bipolare, ha praticamente monopolizzato il campo degli integrati delle scale LSI e VLSI inizialmente con i PMOS e successivamente con i veloci NMOS e CMOS.
Rispetto ai TTL, questi ultimi i CMOS (Complementary MOS), offrono il vantaggio di un consumo di gran lunga inferiore ma una velocità decisamente più bassa. Negli ultimi anni poi, sempre la tecnologia CMOS ha sviluppato gli H-CMOS (High-speed CMOS) delle serie HC e HCT raggiungendo le frequenze di lavoro degli integrati TTL-LS.
CENNI SULLA TECNOLOGIA MOS
I MOSFET o MOS sono transistori ad effetto di campo (FET significa infatti Field-Effect Transistor), con una struttura particolare formata dalla sovrapposizione di strati di metallo, ossido e semiconduttore (MOS sta per Metal-Oxide-Semiconductor). Il più comune è il MOS a canale di arricchimento (enhancement NMOS).
In un substrato (substrate o body), costituito da silicio monocristallino drogato p, vengono diffusi due pozzetti fortemente drogati n+, sui quali vengono direttamente sovrapposte le metallizzazioni di source (sorgente) e di drain (pozzo). La metallizzazione di gate a sua volta ricopre la zona fra source e drain ed è separata dal semiconduttore da uno strato isolante di ossido di silicio (SiO2).
Il MOS, come il BJT, può essere utilizzato sia come amplificatore di segnale, sia in commutazione. A seconda del caso, il punto di funzionamento, nella caratteristica di uscita, si troverà in piena zona di saturazione se il dispositivo è
utilizzato come amplificatore, o passerà direttamente da uno stato di interdizione ad uno di piena conduzione in zona resistiva, se il MOS è utilizzato in commutazione.
In quest'ultimo caso di funzionamento, nel MOS non esiste il tempo di immagazzinamento, che invece condiziona fortemente il funzionamento dei BJT. Tuttavia però il tempo di commutazione di un MOS in on e in off è condizionato fortemente dalle capacità parassite esistenti tra gate, source e drain e dalle capacità di carico.
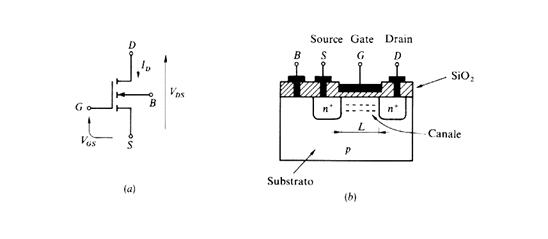
SCHEMA DI UN MOS A CANALE DI ARRICCHIMENTO
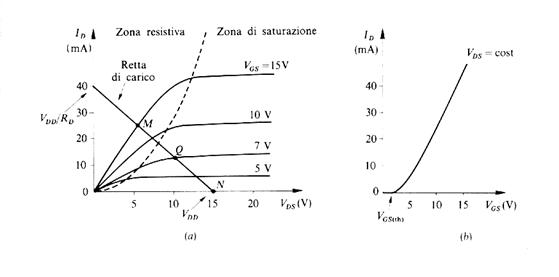
CARATTERISTICHE DI UN MOS
1.3.3 I CMOS
I CMOS (dall'inglese Complementary MOS) o MOS complementari, oltre ad essere impiegati sempre più nell'alta scala di integrazione, offrono serie complete di integrati SSI e MSI. Come la TTL anche questa famiglia ha dato origine a numerose sottofamiglie. La struttura base dei CMOS, è quella dell'inverter. La porta NOT è costituita da due MOS complementari, cioè da un NMOS e da un PMOS con caratteristiche elettriche simili, posti in serie con i pin drain connessi insieme.
Al contrario dei TTL l'alimentazione dei dispositivi non è vincolata ma può variare da 3 a 18 V per le serie 4000B e 74C e da 2 a 6 V per le serie HC e AC. I terminali di alimentazione della serie 4000B (la serie utilizzata per il progetto) sono indicati con le sigle VDD (per il positivo) e VSS (per il negativo). Nelle altre serie si usa invece la convenzione TTL (ovvero Vcc e GND).
I dispositivi CMOS hanno il vantaggio di richiedere una potenza molto ridotta dall'alimentazione, in quanto hanno una bassa dissipazione di potenza. Come detto, il maggiore inconveniente della famiglia CMOS è invece la velocità di propagazione, più bassa che nella TTL a causa del tempo di carica delle capacità parassite in questi tempi però il problema è quasi stato risolto portando il tempo di propagazione a un valore quasi del tutto simile a quello di un TTL eliminando così uno dei limiti del loro utilizzo.
L'immunità al rumore è buona ma, soprattutto le porte delle serie più sofisticate, generano rumore. Infatti in queste, le commutazioni sono rapide e le escursioni di tensione alte. Riassumendo, la tecnologia CMOS è caratterizzata da numerosi aspetti positivi: basso consumo di potenza, alta densità di componenti, larga gamma di alimentazione e di temperature di esercizio. I CMOS presentano anche degli inconvenienti rispetto ai dispositivi bipolari, quali: velocità più basse, rumore più elevato e amplificazioni più basse.
SCHEMA A BLOCCHI DEL PROGETTO
VISUALIZZAZZIONE DEI DATI SU LED ROSSI SELEZIONE DA TRASMETTERE
TRASMETTITORE
RICEVITORE

DEI DATI
CODIFICA DEL DATO
E CARICAMENTO SU REGISTRO S.I.P.O.


ELABORAZIONEDEI DATI PER TRASMISSIONE IN MODALITÁ P.P.M. |
DEGLI IMPULSI DI CORRENTE GENERATI DAL FOTODIODO
TRASMISSIONEDEI DATI IN MODULAZIONE DI POSIZIONE DEGLI IMPULSI |

 ANALISI SPECIFICHE
ANALISI SPECIFICHE
LISTA COMPONENTI
1 IC CMOS TBA 2800 BC U1
1 IC CMOS CD4098 BC U2
1 IC CMOS CD40106 BC U3
1 IC CMOS CD4040 BC U4
1 IC CMOS CD4015 BC U5
1 IC CMOS CD4076 BC U6
1 Fotodiodo BPW41 D1
8 4 Diodi led Rossi DL1/DL4
9 1 Diodo led Verde DL5
5 Transistor BC337 NPN Q1/Q5
2 Diodi di segnale 1N4148 D2, D3
1 Condensatore 2.2mF Elettrolitico C1
2 Condensatori 10nF 63V (Plastici) C2, CT
1 Condensatore 1.5nF 63V (Plastico) C3
2 Condensatore 10mF 63V (Plastico) C4
1 Condensatore 10mF Elettrolitico CP
1 Condensatore 100nF 63V (Plastico) C6
1 Condensatore 1nF 63V (Plastico) C8
5 Resistenze 27kW ¼ W RB1/RB5
6 Resistenze 47kW ¼ W R2, R3
2 Resistenze 100W ¼ W R5, RP
1 Resistenza 40kW ¼ W R6
1 Trimmer 0:220kW Multi giri R8
1 Resistenza 12kW ¼ W R9
4 Resistenze 180W ¼ W RC1/RC4
1 Resistenza 150W ¼ W RC5
SCHEMI
SCHMA ELETTRICO
MASTER
LATO SALDATURE
LATO COMPONENTI
VISIONE D'INSIEME
DISPOSIZIONE COMPONENTI
ANALISI FUNZIONALE
AMPLIFICATORE DI SEGNALE TBA2800
FUNZIONAMENTO DEL TBA2800
Questo circuito integrato è un sofisticato amplificatore specializzato proprio nell'amplificazione di questo particolare tipo di segnale: molto debole e formato da impulsi di corrente.
Dato la sua sofisticatezza, abitualmente, il fornitore fornisce solo pochi elementi per conoscerlo: uno schema a blocchi interno e uno schema di montaggio consigliato. Il TBA2800 al suo interno è composto da quattro parti principali.
Il primo è un amplificatore a guadagno controllato in temperatura tramite resistori N.T.C. (Negative Temperature Coefficent). Questo di tipo di resistori o meglio, termistori, sono a resistenza variabile con la temperatura; il coefficiente termico in questo caso è negativo ma, può anche essere positivo (si usa allora il suo opposto: il P.T.C.). Il riscaldamento del resistore N.T.C. avviene tramite il passaggio di corrente nel suo interno. La funzione di questo primo amplificatore è quella di assicurare una risposta quasi priva di interferenze (anche con elevato inquinamento luminoso come: la presenza di molta luce ambientale, di intense sorgenti di luce infrarossa o per la presenza di luce modulata a 50Hz come quella proveniente da lampade fluorescenti).
Per quanto riguarda la seconda e la terza parte, non si tratta altro che di altri due amplificatori, ma accoppiati dinamicamente che amplificano ulteriormente il segnale e separano gli impulsi corretti dal rumore e da altri deboli segnali non desiderati (ovvero le interferenze).
L'ultima parte dello schema a blocchi interno fornito dal costruttore, è un inverter che complementa gli impulsi negativi d'uscita presenti nel piedino di uscita 7, fornendo impulsi positivi al piedino 8.
I condensatori C1-C2, detti condensatori di accoppiamento, stabiliscono la durata degli impulsi. Interponendo poi una resistenza tra il piedino 6 e la massa, si può aumentare l'immunità ai disturbi esterni diminuendo però la sensibilità dell'amplificatore, non risultando pertanto conveniente nell'ambito del nostro progetto.
Per evitare ulteriori interferenze tutto l'integrato, i condensatori di accoppiamento, il fotodiodo e il condensatore C3 vanno accuratamente schermati anche solamente aggiungendo zone di massa tutto intorno ai componenti. Tale zona va poi collegata alla massa generica del progetto.
SCHEMA A BLOCCHI INTERNO
Questo è lo schema a blocchi interno dell'amplificatore di segnale TBA2800.
Come già detto, il circuito integrato e tutti gli elementi essenziali per il suo funzionamento sono schermati e collegati a massa.
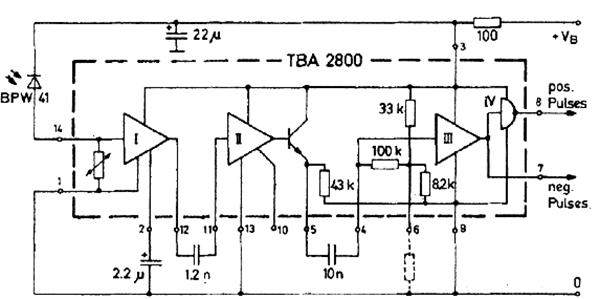
SCHEMA A BLOCCHI INTERNO DELL'AMPLIFICATORE DI SEGNALE "TBA2800"
FOTODIODO A SEMICONDUTTORE
Un fotodiodo a semiconduttore, è una giunzione p-n, polarizzata inversamente ed illuminata, è attraversata da una corrente che varia linearmente al variare del flusso luminoso e indipendente dal valore di polarizzazione inversa.
In assenza di luce, la corrente do buio di un fotodiodo corrisponde alla corrente di saturazione inversa dovuta ai portatori minoritari generati termicamente. Se invece la luce colpisce la superficie del fotodiodo, in prossimità della giunzione si formano altri portatori minoritari il cui numero è proporzionale alla quantità di luce assorbita. I portatori si diffondono verso la giunzione, la attraversano e conducono formando la corrente d'illuminazione. La variazione di sensibilità di un fotodiodo, dipendono dalla temperatura ambiente, dalla focalizzazione della luce sulla superficie del fotodiodo, dall'angolo di incidenza delle radiazioni luminose sulla sua superficie e dalla frequenza di taglio.
CIRCUITO MONOSTABILE
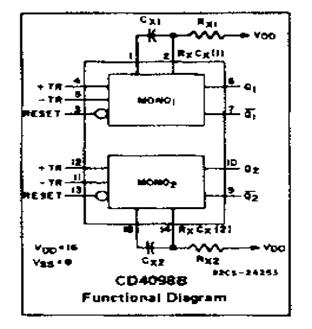
SCHEMA FUNZIONALE DI UN MULTIVIBRATORE MONOSTABILE
Potendo dare una definizione di circuito monostabile, si può dire che è un circuito che genera un impulso di durata prestabilita, quando al suo ingresso è applicato un impulso di comando, detto anche impulso di trigger.
Un monostabile è caratterizzato dall'esistenza di uno stato stabile, nel quale può rimanere indefinitamente; a seguito di un impulso di trigger, il multivibratore passa in uno stato instabile in cui rimane per un tempo prestabilito, per poi tornare allo stato di partenza.
FUNZIONAMENTO MONOSTABILE "MONO 1"
Questo circuito monostabile, deve essere rigorosamente retriggerabile e serve per far accendere un led verde (DL5) che confermi l'arrivo di un segnale.
Se infatti facciamo entrare nell'ingresso di trigger il segnale amplificato in precedenza dal TBA2800, e dimensioniamo opportunamente il condensatore e la resistenza "di controllo" del monostabile, possiamo fare in modo che il led si accenda all'arrivo del segnale e si spenga soltanto una volta interrotta la trasmissione da parte del circuito trasmettitore. Essendo quindi il circuito impostato in modo retriggerabile, all'arrivo di nuovi impulsi, il monostabile ricomincia il conteggio del tempo impostato da zero. Bisognerà quindi impostare il monostabile con un conteggio superiore all'intervallo massimo tra due impulsi. Questo intervallo è quello del tempo di sincronismo (che vale 30ms).
DIMENSIONAMENTO MONOSTABILE "MONO 1"
Come è stato detto, questo circuito monostabile deve essere impostato in modo tale che resti in funzione per un periodo maggiore del tempo massimo che trascorre tra due impulsi. Questo tempo è il tempo di sincronismo che fa passare un tempo di 30ms dall'ultimo impulso prima di ricominciare la trasmissione della parola. Per ragioni di eventuali arrotondamenti, e per sicurezza, si prende un tempo quasi del doppio maggiore: si è preso per questo progetto un tempo di 50ms. Posso così dire che solo nel caso in cui entro 50ms dall'ultimo impulso arrivato, non ne arrivi uno nuovo, il circuito monostabile cesserà di funzionare. Devo passare quindi al dimensionamento della rete RC utilizzando la formula Tw = k·t che mi permette di calcolare il prodotto RC conoscendo il tempo di propagazione Tw (50ms) e la costante k che viene dichiarata dal produttore. Per l'integrato in questione, il CD4098, la costante k dichiarata dal costruttore, equivale a 0.5. Ho quindi:
La costante RC può essere di conseguenza calcolata come:
![]()
A questo punto so con certezza che la costante RC è uguale a 100ms. Viene imposto il valore del condensatore C (C4) uguale a 10mF. Risulta così semplice calcolare il valore della resistenza R (R4) calcolando la formula inversa:
![]()
![]()

Riassumendo, il condensatore C4 è stato fissato a un valore di 10mF. La resistenza accoppiata di controllo R4 è risultata di 10kW, tale valore è già presente nella scala di normalizzazione e pertanto non necessita di ulteriori arrotondamenti.
FUNZIONAMENTO MONOSTABILE "MONO 2"
La durata degli impulsi, con questo monostabile, viene allargata da 100ms a 2ms circa perché altrimenti questi non sarebbero rilevati dalla logica degli integrati, che lavorano ad ampiezze d'onda superiori.
DIMENSIONAMENO MONOSTABILE "MONO 2"
con k dichiarato dal costruttore come 0,5.
Ho quindi:

Pongo il condensatore di controllo Cx (C6) = 100nF:
![]()
![]()

![]()
OSCILLATORE ASTABILE
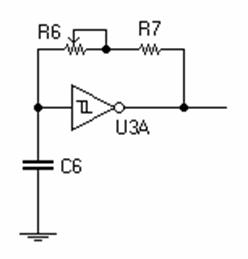
SCHEMA ELETTRICO DI UN OSCILLATORE ASTABILE
FUNZIONAMENTO
L'oscillatore astabile utilizzato nel progetto, ha la funzione di generare un'onda quadra di frequenza f=10240Hz. Tale frequenza ha la funzione di comandare il contatore ovvero di fornirgli un impulso di clock al suo specifico ingresso.
L'oscillatore di base è composto da condensatore, inverter a trigger di Schmitt e da un resistore. Tale resistore nel caso specifico è stato sostituito da una resistenza trimmer multigiri seguita da una resistenza fissa di protezione. Questa modifica è stata effettuata per poter rendere più precisa la generazione dell'onda; una volta montato il circuito, infatti, agendo sul trimmer multigiri, l'impostazione della frequenza (che può essere letta direttamente da un frequenzimetro o da un oscilloscopio) avviene "manualmente".
La resistenza fissa è esclusivamente di protezione nel caso in cui all'accensione del circuito la resistenza multigiri sia accidentalmente tarata su 0, e come tale assume un valore pari a circa il 10% della resistenza totale (la resistenza multigiri va dimensionata a un valore di circa il doppio del 90% restante).
DIMENSIONAMENTO
La frequenza da impostare è dunque di 10240Hz; dimensiono il resistore e il condensatore che compongono, oltre all'inverter a trigger di Schmitt, l'oscillatore:
f = 10240Hz
![]()
![]()
Guardando il data sheet dell'inverter a trigger di Schmitt, si nota che il costruttore, tra gli esempi di utilizzo, mostra anche il caso dell'oscillatore con resistore e condensatore. In fianco dà anche una formula consigliata per il dimensionamento dei due componenti:

VP e
VN corrispondono rispettivamente alla tensione di soglia superiore e
alla tensione di soglia inferiore. A temperatura ambiente di 25°C, con alimentazione
pari a 5V, questi valori, dichiarati sui data sheet dal costruttore, corrispondono
a: ![]()
![]()
A questo punto, sostituendo alla formula i valori conosciuti:
si ricava
che la costante RC è: 

La costante RC (t) nell'oscillatore in questione è composta da R6 e C6. Una volta posto il condensatore C6=1nF posso determinare il valore della resistenza R da inserire tra l'ingresso e l'uscita dell'inverter:
![]()
![]()
La resistenza calcolata assumerà un valore di circa 120kW (dipenderà da come verrà arrotondato il valore). Come detto in precedenza, per un fattore di precisione, di quei 120kW
10% = resistenza fissa di protezione = 12kW
90% = valore da assegnare alla resistenza variabile = 220kW
La resistenza variabile sarà un trimmer variabile tra 0 e 220kW.
CONTATORE
Dato che la frequenza impostata è di 10240Hz si può dire facilmente che in un secondo avvengo 10240 impulsi. Ciò sta a significare che in 10ms approssimativamente ci sono
![]() ~102 impulsi
~102 impulsi
Tale valore, trasformato in binario sarà 102d=1100110b
Impostando una proporzione, si può semplicemente dire che in 15ms si hanno:
![]() impulsi ovvero
153d=10011001b in cifre binarie.
impulsi ovvero
153d=10011001b in cifre binarie.
Per finire, in 30ms si hanno invece:
102 3=306 che 306d=100110010b in binario.
Nel contatore CONT i diversi impulsi infine, sono così visti:
Ciò significa che se ad esempio sto trasmettendo la cifra 1, l'intervallo tra i due impulsi è di 10ms e, l'uscita del contatore Q7 è a 0 ma dato che prima dell'ingresso di clock del registro a scorrimento c'è un inverter, il segnale diventa un 1. Il registro continuerà a caricare dati fintantoché all'ingresso di clock non risarà uno 0 ovvero in uscita da Q7 del contatore, dovrà esserci un 1. Questo avviene solamente quando tra due impulsi c'è un intervallo di 30ms ovvero nel solo caso in cui il circuito trasmettitore stia trasmettendo il tempo di sincronismo.
Pertanto, finché l'uscita
Q8 del contatore è 0 viene attivato solamente il registro a scorrimento che
continuerà a caricare dati in serie fino all'istante in cui l'uscita Q8
commuterà in 1. A quel punto, significa che è arrivato il tempo di sincronismo,
viene interrotto il caricamento dei dati sul registro, i dati verranno passati
al flip-flop, il contatore subisce il RESET, che deve arrivare con pochissimo
ritardo rispetto a quello effettivo (per un tempo variabile da 50 a 100ms)
per poter permettere ai circuiti di prepararsi a un nuovo processo di ricezione
ed elaborazione di dati. ![]()
RETE DI RITARDO "RC"
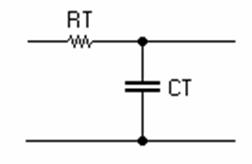
SCHEMA ELETTRICO DELLA RETE DI RITARDO "RC"
FUNZIONAMENTO
Il dispositivo è composto da un resistore e da un condensatore. Il principio di funzionamento sfrutta il fatto che il segnale viene ritardato a causa della carica del condensatore, il tempo di ritardo dipenderà quindi dal tempo di carica di C e quindi dai valori di R e di C.
Questa rete serve a ritardare il segnale del tempo di sincronismo proveniente dal contatore stesso prima che ritorni nell'ingresso di RESET. Infatti, con il tempo di sincronismo il contatore si azzererebbe immediatamente senza trasmetterlo agli altri integrati. Un piccolo ritardo anche di qualche decina di ms basta per far sì che tutto il procedimento avvenga in modo corretto. Al contrario, in assenza di una rete ritardante, il tempo di sincronismo verrebbe del tutto ignorato dal ricevitore.
DIMENSIONAMENTO
La formula di carica del condensatore è:
 Sostituendo
e adattando la formula si ha:
Sostituendo
e adattando la formula si ha:
Da questa formula, presa come "di base", tramite formule matematiche, si ricava la costante RC:
Posto poi il condensatore C=10nF calcolo il valore di resistenza che regoli la carica del condensatore nel modo voluto.
![]()
![]()

Questo valore, approssimato per eccesso porta a scegliere una resistenza R da 5.6kW
Si calcola ora il vero ritardo causato dal condensatore da 10nF con una resistenza da 5.6kW; infatti, se avessimo voluto un ritardo di 50ms l'unica scelta possibile sarebbe stata quella di inserire un trimmer dato che una resistenza da 4.6kW non esiste. Quindi:
![]()
Tornando alla formula di carica del condensatore e sostituendo il nuovo valore di t, il valore dell'alimentazione E, il valore di VC, ed eseguendo passaggi matematici, esplicito la funzione in "t":
![]()
![]()
![]()
![]()
![]()

Il vero tempo di ritardo è quindi di 60ms un tempo ugualmente accettabile.
TRANSISTOR
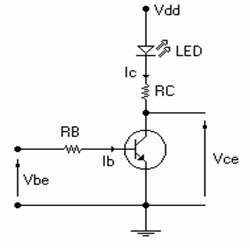
SCHEMA DELLE CONNESSIONI CON IL TRANSISTOR
DIMENSIONAMENTO R DI COLLETTORE
RESISTENZE PER LED ROSSI
Dalla formula di partenza:
![]()
ricavo il valore della resistenza RC da porre al collettore del transistor per fare in modo che il led si accenda e non si bruci:
L'intensità di collettore è posta a 15mA, la tensione di alimentazione è 5V, la tensione di collettore-emettitore e la tensione di soglia si trovano sui data sheet quindi è possibile calcolare la resistenza di base del transistor:
![]()
RESISTENZE PER LED VERDE
Questa volta cambia però il valore della tensione di soglia del diodo (Vg), che non vale più 1.6V come per il diodo rosso ma 2.2V:
![]()
La resistenza di collettore per il pilotaggio del led verde appena calcolata, viene normalizzata ad un valore di 150W
DIMENSIONAMENTO R DI BASE
Non interferendo nel calcolo della resistenza di base la tensione di soglia del diodo led, il dimensionamento è uguale per tutti e quanti i transistor.
La resistenza di base RB, viene calcolata come:
Conoscendo la IC, posta prima a 15mA, l'intensità di base si calcola come:
Sostituendo quindi alla formula iniziale ho:

Tale valore viene poi normalizzato a 27kW
Ricapitolando, per tutte le resistenze appena calcolate si ha:
RB RC
Q1/Q4 27kW 180W
Q5 27kW 150W
REGISTRO A SCORRIMENTO
I registri a scorrimento (o Shift Register, da cui la sigla "SR"), sono caratterizzati dalla proprietà di poter memorizzare dati e farli scorrere.
I registri a scorrimento, sono formati da celle, costituite da flip-flop D o JK o SR ecc.
Nel caso di questo progetto, l'ingresso è seriale e l'uscita è in parallelo; si tratta quindi di un registro SIPO (Serial-In Parallel-Out).
I dati sono applicati in serie all'ingresso e, ad ogni impulso di clock, scorrono da un flip-flop all'altro.
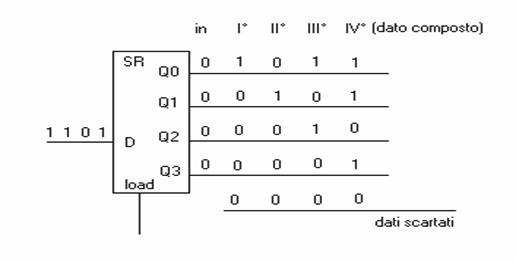
Ad esempio se la parola che si sta trasmettendo è 1101, il dato sarà così visto:
A0 A1 A2 A3
1 0 1 1
Il primo dato ad essere caricato al primo impulso di clock, sarà dunque A3 che andrà a finire nella prima cella. Al secondo colpo di clock, il dato caricato in precedenza viene shiftato nel registro successivo, e nel primo registro viene caricato il nuovo dato (A2). e così via.
A ogni impulso di clock dunque viene caricato un dato; i dati da caricare sono 4, e nel registro ci sono 4 celle libere. Dovranno avvenire quindi solo quattro impulsi perché ad ogni impulso successivo, il dato più vecchio in ordine di tempo di immagazzinamento, viene scartato.
È per questo al seguito dell'SR, viene messo un flip-flop che raccoglie i dati che escono dal registro, e una volta composto il dato (cioè all'arrivo del TS), scarica i dati sulle uscite: verso i led.
SCHEMA FUNZIONALE DI UN REGISTRO A SCORRIMENTO A 4 BIT
FLIP-FLOP
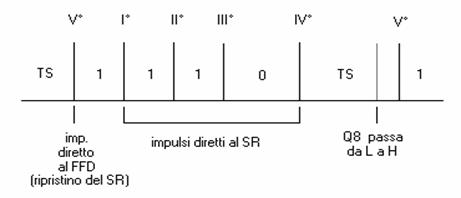
I fronti dell'uscita Q8 del contatore, vanno: all'ingresso di clock del FFD, al LOAD del SR e all'ingresso di RES del contatore stesso (ritardato prima dalla rete T). Il fronte in questi ingressi non può esserci in contemporanea: se deve andare al LOAD del SR o al clock del FFD lo decidono i diodi D1 e D2.
Se ad esempio il valore di Q8 è 0, nel FFD non succede niente perché gli impulsi sono di 100ms e ampiezza 0.5V, tensione insufficiente per poter essere considerata dal flip-flop.
Ecco così che, quando l'uscita di Q8 vale 1, l'impulso viene diretto al clock del flip-flop che memorizza i dati presenti in quel momento nei suoi ingressi e li trasferisce nelle uscite verso quindi i quattro led.
Ad esempio, se si sta trasmettendo la parola 1110, i primi quattro impulsi, che determinano le quattro cifre trasmesse, sono diretti al registro a scorrimento. Il quinto impulso, che determina il tempo di sincronismo, è diretto al flip-flop e dà l'ordine di caricare in memoria i dati presenti ai suoi ingressi (dove ormai si ha il dato composto). Con l'arrivo del quinto impulso, avviene anche il ripristino del SR che comincia a caricare i nuovi dati.
DESTINAZIONE DEGLI IMPULSI IN USCITA DA Q8
FILTRO RC
Si tratta di un filtro che riduce ulteriormente le interferenze dato che attenua le frequenze al di sotto di quella impostata. Si tratta di un resistore e di un condensatore posti tra il fotodiodo e l'alimentazione. Con questo filtro, in un certo senso, si protegge anche il circuito da possibili sbalzi di tensione.
CONCLUSIONI FINALI
NOTE DI COLLAUDO
GRAFICI / RILEVAMENTI
NOTE
DATA SHEET
FONTI:
MICRONAS INTERMETALL GmbH
NATIONAL SEMICONDUCTOR
HARRIS SEMICONDUCTOR
SGS - THOMPSON MICROELECTRONICS
BIBLIOGRAFIA
Per la stesura della relazione si è fatto riferimento ai seguenti testi:
- "MANUALE DI ELETTRONICA E TELECOMUNICAZIONI", ed.4
Biondo, Sacchi
Hoepli
- "ELETTRONICA 1, componenti e sistemi digitali"
Cunimberti, De Lucchi
Petrini
- "ELETTRONICA 2, componenti e tecniche digitali"
Cunimberti, De Lucchi
Petrini
- "TDP, Tecnologie Disegno Progettazione" - vol.1
Cunimberti, De Lucchi
Petrini
- "TDP, Tecnologie Disegno Progettazione" - vol.2
Cunimberti, De Lucchi
Petrini
Per lo sviluppo pratico del progetto:
il software "Arianna - ADraft" per il disegno dello schema elettrico e per la progettazione creazione del master, il software "Arianna - APCB".
|
Privacy |
Articolo informazione
Commentare questo articolo:Non sei registratoDevi essere registrato per commentare ISCRIVITI |
Copiare il codice nella pagina web del tuo sito. |
Copyright InfTub.com 2026