|
|
| |
ALTRI DOCUMENTI
|
||
|
|
STRUTTURA DI UN CONTROLLORE PROGRAMMABILE
La tipologia dei PLC presenti attualmente in commercio si può suddividere generalmente in tre categorie:
micro PLC (S 7 200 ciclo scansione 10ms.)
PLC medi (S 7 300 ciclo di scansione 1ms.)
PLC large ( ciclo di scansione sotto 1ms.)
La distinzione fra una categoria di PLC e un altra dipende essenzialmente:
dal numero di dispositivi in ingresso ed uscita gestiti,
2 )dalla potenza e dalla velocità della CPU
3 )dalla quantità della memoria disponibile
fifigura di Micro PLC
Un PLC è costituito dalle seguenti sezioni:
CPU
Sezione I/O
Bus
Alimentatore
Nella terminologia adottata per i controllori programmabili con il termine CPU (Central Processing Unit, Unità Centrale di Elaborazione) di un sistema PLC si intende:
un modulo comprendente il microprocessore (o più microprocessori), la memoria centrale (RAM e ROM), il modulo di comunicazione con le altre sezioni.
Quindi quando si parla di CPU di un PLC non si intende solo il microprocessore di cui è dotato. Solitamente i PLC, soprattutto i più potenti, utilizzano più microprocessori che lavorano in parallelo.
La sezione degli I/O è costituita da più moduli di ingresso e uscita generalmente intelligenti,
gestiti cioè da un microprocessore come i moduli I/O analogico per poter misurare temperatura, livello, posizione.
Generalmente nei micro PLC è presente solo un modulo di I/O digitale o discreto dove per digitale o discreto si intende un ingresso (o uscita) capace di leggere (o di impostare) un segnale
che può assumere solo due valori definiti (0 logico o 1 logico).
Tutti i moduli di I/O sono connessi mediante un supporto fisico detto backplane L'alimentazione al sistema è fornita da un alimentatore modulare. Dal punto di vista logico il backplane costituisce il bus del sistema PLC.
Nei micro PLC queste sezioni costituiscono un tutto unico, mentre nei PLC large e medi prevale la struttura modulare.
|
|
Figura 2 PLC modulare
COMPONENTI PRINCIPALI DEL MICRO PLC S7-200
I Micro PLC S7-200 possono essere composti da un'unità CPU S7-200 indipendente o collegata ad una serie di unità di ampliamento opzionali
CPU S7-200
La CPU S7-200 riunisce l'unità centrale (CPU), l'alimentatore e gli ingressi e uscite digitali in un unico dispositivo autonomo e compatto:
La CPU esegue il programma e memorizza i dati per il controllo del compito di automazione e del processo. Aggiungendo delle unità di ampliamento è possibile aumentare il numero di I/O della CPU.
L'alimentatore (indicato come datore di segnale) fornisce corrente all'unità di base e alle unità di ampliamento ad essa collegate.
Gli ingressi e le uscite costituiscono i punti di controllo del sistema:
gli ingressi controllano i segnali provenienti dai dispositivi di campo
(quali i sensori e gli interruttori);
le uscite controllano pompe, motori o altri dispositivi del processo.
L'interfaccia di comunicazione permette di collegare la CPU ad un dispositivo di programmazione o ad altri dispositivi.
I LED di stato forniscono informazioni sullo stato di funzionamento della CPU (RUN o STOP), lo stato attuale degli I/O locali e gli errori di sistema rilevati.
In alcune CPU l'orologio hardware è già integrato, in altre è necessario inserire un modulo di orologio.
Un modulo EEPROM seriale plug-in consente di memorizzare i programmi della CPU e di trasferirli da una CPU all'altra. Un modulo di batteria plug-in consente di aumentare la ritenzione della memoria dati nella RAM
|
|
|
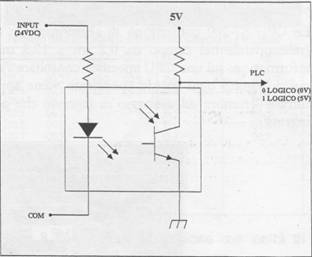
Figura 5 Schema di principio di un
ingresso |
|
In alcuni tipi di PLC l'optoisolatore è formato da due LED posti in antiparallelo e un fototransistor, in questo modo è possibile collegare il dispositivo d'ingresso nei due modi possibili. |
MODULI DI INPUT - OUTPUT DIGITALI
Il Controllore Programmabile è progettato per operare con un certo numero di apparecchiature quali finecorsa, fotocellule, sensori di prossimità, relè, contattori, ecc.;
le informazioni provenienti dal processo controllato possono essere definite con il temine più generale di segnali elettrici.
Questi segnali elettrici sono segnali digitali in quanto possono assumere solo due livelli di tensione (per un finecorsa alimentato a 24VDC il livello basso può essere identificato con 0 V e il livello alto con 24 V).
Una sezione di Input rappresenta l'interfaccia fra la logica interna del PLC e i segnali esterni e svolge essenzialmente due operazioni:
Adatta i segnali esterni, che possono essere a 24V DC, 24V AC, ecc., in modo tale da essere acquisiti dal controllore programmabile, funzionante generalmente in logica 0V 5V.
Separa i dispositivi del campo, dal controllore programmabile, in modo tale da assicurare la funzionalità del PLC anche in caso di guasti ai dispositivi d'ingresso come cortocircuiti o sovratensioni.
OPTOISOLATORE
La tecnica maggiormente utilizzata per l'adattamento dei segnali e l'isolamento utilizza gli optoisolatori.
Questi dispositivi sono costituiti da un diodo LED e un fototransistor: quando passa corrente attraverso il diodo il transistor va in saturazione, mentre quando non passa corrente il transistor è in interdizione.
La separazione elettrica dei dispositivi d'ingresso dalla logica interna del PLC viene indicata con il termine di isolamento galvanico e i moderni optoisolatori arrivano ad avere un isolamento nell'ordine di 5000VDC.
Un ingresso come quello mostrato in Figura 5 viene indicato negli schemi tecnici dei Controllori Programmabili come ingresso DC e generalmente gli ingressi di un modulo di Input hanno il morsetto COM in comune.
Dato che il segnale viene trasformato in un segnale luminoso dal LED bisogna assicurarsi che il dispositivo collegato all'ingresso possa fornire una
corrente sufficiente per l'optoisolatore.
Nello schema di Figura il dispositivo d'ingresso
deve essere collegato rispettando opportunamente
le polarità in modo da polarizzare direttamente il
diodo LED.
|
|
IL RESPONSE TIME E GLI INGRESSI "FILTRATI"
Quello dell'isolamento galvanico non è il solo problema della sezione di Input di un PLC, infatti le informazioni acquisite potrebbero essere "inquinate" da disturbi eventualmente sovrapposti al segnale.
Per evitare false informazioni viene valutato dalla logica del PLC non solo il livello logico del segnale ma anche la sua durata. Infatti è presumibile che un disturbo abbia una breve durata, mentre un segnale corretto dovrebbe presentare un tempo di permanenza ben superiore.
Quindi un livello logico d'ingresso viene acquisito come informazione solo se permane per un tempo prefissato questo intervallo di tempo viene chiamato tempo di risposta ( r e s p o n s e t i m e ).
Figura 6 Tempo di risposta della sezione di input di un PLC
Nell'esempio di Figura 6 il segnale non è acquisito quando per la prima volta si porta allo stato alto perché non rimane attivo per un tempo sufficiente, mentre viene acquisito quando rimane alto o basso per almeno un intervallo di tempo pari al response time
Per alcuni ingressi del controllore programmabile è possibile impostare il valore del response time, tali tipi di ingressi vengono detti filtrati.
Le CPU S7-200 consentono di selezionare un filtro di ingresso che definisce un tempo di ritardo (selezionabile nel campo da ms a ms) per alcuni o tutti gli ingressi digitali locali (per informazioni sul una CPU specifica consultare l'appendice A del manuale). Come indicato nella figura qui di seguito ogni ritardo specificato viene applicato a gruppi di quattro ingressi. Il ritardo aiuta a filtrare il rumore sul cablaggio di ingresso che potrebbe causare modifiche inavvertite allo stato degli ingressi.
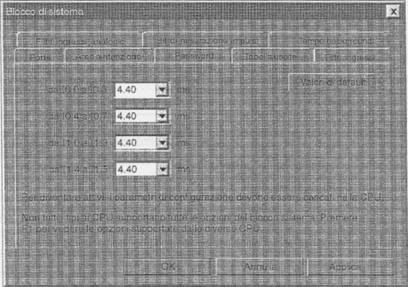
Il filtro di ingresso è parte dei dati di configurazione CPU che vengono caricati e memorizzati nella memoria CPU. Per configurare i tempi di ritardo del filtro degli ingressi, utilizzare il comando di menu del sistema di sviluppo MICROWIN Visualizza > Blocco di sistema e fare clic sulla scheda Filtri ingressi.
|
|
ALLOCAZIONE DEGLI INGRESSI
Per permettere al programma Kop di riconoscere il dispositivo che fornisce il segnale,
ad ogni ingresso viene assegnato in fase di configurazione un indirizzo o riferimento;
in questo modo per ogni ingresso esiste un solo indirizzo nell'ambito del sistema.
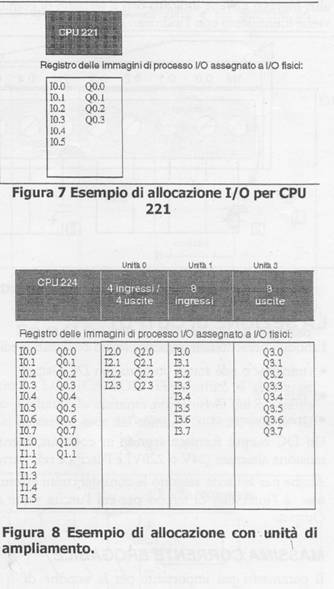
![]() Per i PLC micro
esiste una configurazione fissa, non
modificabile dall'utente: per esempio per i S7 200 (212, 216, 222, ecc.) i riferimenti che vanno da I0.0 a I0.7 corrispondono
ai terminali d'ingresso fisicamente presenti
Per i PLC micro
esiste una configurazione fissa, non
modificabile dall'utente: per esempio per i S7 200 (212, 216, 222, ecc.) i riferimenti che vanno da I0.0 a I0.7 corrispondono
ai terminali d'ingresso fisicamente presenti
Per i sistemi modulari è invece necessario allocare il modulo nella fase di configurazione affinché la CPU possa scambiare i dati con il modulo: se non vengono specificati gli indirizzi che un modulo occupa, questo non viene riconosciuto dalla CPU e quindi non è utilizzabile dal programma Kop.
Gli I/O locali forniti dalla CPU forniscono un set prestabilito di indirizzi I/O.
Si potranno aggiungere alla CPU punti I/O collegando le unità di ampliamento I/O al lato destro della CPU, formando in tal modo una catena di ingressi e uscite.
Gli indirizzi di ingressi e uscite dell'unità di ampliamento sono determinati dal tipo di I/O e anche dalla posizione dell'unità nella catena (nel caso di presenza di diverse unità dello stesso tipo). Ad esempio, un'unità di uscita non influenza gli indirizzi degli ingressi dell'unità, e viceversa. Analogamente, le unità analogiche non influenzano l'indirizzamento delle unità digitali e viceversa.
Le unità di ampliamento digitali (o discrete) riservano sempre uno spazio del registro di immagine di processo (i riferimenti di tipo I e Q) in incrementi di 8 bit (un byte).
Se l'unità non fornisce un punto fisico per ogni bit di ogni byte riservato, i bit inutilizzati non possono essere assegnati alle unità successive della catena I/O. Nelle unità di uscita i bit inutilizzati dei byte riservati vengono impostati a zero in ogni ciclo di aggiornamento degli ingressi. Le unità di ampliamento analogiche sono sempre allocate in incrementi di due punti. Se l'unità non fornisce I/O fisici per ognuno di tali punti, tali I/O vanno persi e non sono disponibili per l'assegnazione a unità successive della catena I/O.
|
Privacy |
Articolo informazione
Commentare questo articolo:Non sei registratoDevi essere registrato per commentare ISCRIVITI |
Copiare il codice nella pagina web del tuo sito. |
Copyright InfTub.com 2025